Japanese page
Welcome to the website of Swimming Human Simulation Model "SWUM"!
Last update : 2023/3/31
What is SWUM?
SWUM (SWimming hUman Model) is a Swimming Human Simulation Model,
which has been developed as a powerful analysis tool for
various dynamical problems in human swimming.
In SWUM, the absolute motion of the whole human body is
solved from the equations of motions for the fluid force
and the body inertia,
by giving the relative body motion (joint angles).
SWUM enables you to analyze the various dynamical problems in swimming,
such as the effect of difference of the swimming form
on the swimming speed and the absolute body motion.
By Whom?
SWUM has been developed by the developer team which
is led by
Prof. Motomu Nakashima, Tokyo Institute of Technology, Japan.
Analysis Example
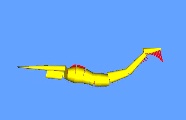
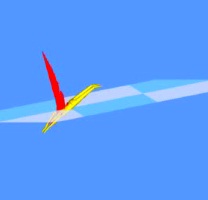
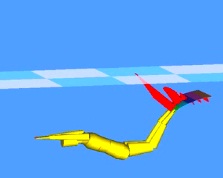
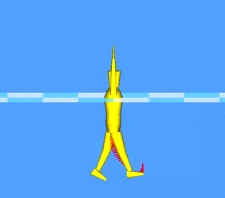
Below movies are analysis examples of SWUM
for the four modern strokes,
which show the motions for one cycle in steady state.
The red lines show the fluid force acting on the each part of the body.
The water surface is checkered.
The total width of the dark and pale blue area corresponds
to the stroke length (swimming distance during one cycle).
The front crawl, breast, back and butterfly strokes are in order below.
(Please use your viewer software's repeat playing function,
since the movie is for only one cycle.)
 Crawl (MPEG movie, 0.4MB)
Crawl (MPEG movie, 0.4MB)
 Breaststroke (MPEG movie, 0.4MB)
Breaststroke (MPEG movie, 0.4MB)
 Backstroke (MPEG movie, 0.4MB)
Backstroke (MPEG movie, 0.4MB)
 Butterfly stroke (MPEG movie, 0.4MB)
Butterfly stroke (MPEG movie, 0.4MB)
Free Software "Swumsuit" as SWUM's Implementation
A software "Swumsuit" was developed
as an implementation of the ideal model SWUM.
In addition,
Swumsuit enables everyone to perform simulation
of the human swimming
with easy GUI (Graphical User Interface) operation.
Swumsuit is a Free Software based on GPL (GNU General Public License).
For the detail of Swumsuit,
please see Swimming Human Simulation Software Swumsuit page.
Musculoskeletal Simulation
By Swumsuit version 3.0.0 or higher,
you can output files for the musculoskeletal analysis software
"AnyBody Modeling System".
By using Swumsuit and AnyBody Modeling System,
you can conduct the full-body musculoskeletal simulation for swimming.
Simulation examples for the four strokes are shown as below.
 Crawl (AVI movie, 2.8MB)
Crawl (AVI movie, 2.8MB)
 Breaststroke (AVI movie, 0.5MB)
Breaststroke (AVI movie, 0.5MB)
 Backstroke (AVI movie, 0.6MB)
Backstroke (AVI movie, 0.6MB)
 Buttefly stroke (AVI movie, 0.6MB)
Buttefly stroke (AVI movie, 0.6MB)
Analysis of Top Swimmer's Underwater Dolphin Kick
The mechanism of the underwater dolphin kick has been analyzed by SWUM.
After the analysis of the dolphin kick by a top athlete swimmer,
optimizating calculations to maximize the swimming speed and propulsive efficiency
were conducted.
The details are in the Reference 6 below.
 Underwater dolphin kick (MPEG movie, 0.2MB)
Underwater dolphin kick (MPEG movie, 0.2MB)
Simulation of Dive Start
The dive start has also been simulated by SWUM.
For this simulation, a special fluid force which acts on the body during water entry
has been introduced to SWUM.
The details are in the Reference 7 below.
 Dive start (MPEG movie, 0.7MB)
Dive start (MPEG movie, 0.7MB)
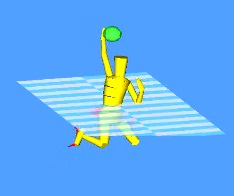
"Multi Agent/Object Simulation"
By Swumsuit 4.0.0 or higher, the "Multi Agent/Object Simulation" has been enabled.
"Multi Agent/Object" means multiple swimmers, such as synchronized swimming, and multiple objects
with a swimmer, such as equipment in the water.
The below examples are monofin swimming (swimmer + monofin),
the shooting motion in the water polo, and the lift in the sychronized swimming.
The details are in the References 8, 9 and 13 below.
 Monofin swimming (MPEG movie, 0.7MB)
Monofin swimming (MPEG movie, 0.7MB)
 Shooting motion in water polo (MPEG movie, 1.1MB)
Shooting motion in water polo (MPEG movie, 1.1MB)
 Lift in synchronized swimming (AVI movie, 2.9MB)
Lift in synchronized swimming (AVI movie, 2.9MB)
Application to Walking in Water
SWUM has also been applied into the walking in water,
which is very effective for rehabilitation.
In this analysis, the ground reaction force acts on the foot
in addition to the fluid forces.
The details are in the Reference 10 and 11 below.
 Walking in water (MPEG movie, 0.6MB)
Walking in water (MPEG movie, 0.6MB)
References (in English)
-
Motomu Nakashima, Ken Satou, Yasufumi Miura,
"Development of Swimming Human Simulation Model Considering Rigid Body Dynamics and Unsteady Fluid Force for Whole Body",
Journal of Fluid Science and Technology, Vol.2, No.1, pp.56-67 (2007)
(Download full paper at the journal's website)
-
Motomu Nakashima,
"Mechanical Study of Standard Six Beat Front Crawl Swimming by Using Swimming Human Simulation Model",
Journal of Fluid Science and Technology, Vol.2, No.1, pp.290-301 (2007)
(Download full paper at the journal's website)
-
Motomu Nakashima,
"Analysis of Breast, Back and Butterfly Strokes by the Swimming Human Simulation Model SWUM",
Biomechanisms of Animals in Swimming and Flying -Fluid Dynamics, Biomimetic Robots, and Sports Science- (Eds. Naomi Kato and Shinji Kamimura), Springer-Verlag, (2007), pp.361-372.
(Download manuscript)
-
Motomu Nakashima,
"Development of Computer Simulation Software "Swumsuit" To Analyze Mechanics of Human Swimming",
Proceedings of the 2005 International Symposium on Computer Simulation in Biomechanics (ISCSB2005), pp.65-66 (2005)
(Download abstract)
-
Motomu Nakashima and Yugo Motegi,
"Development of a Full-Body Musculoskeletal Simulator for Swimming",
Proceedings of the 2007 International Symposium on Computer Simulation in Biomechanics (ISCSB2007), pp.59-60 (2007)
(Download manuscript)
-
Motomu Nakashima,
"Simulation Analysis of the Effect of Trunk Undulation on Swimming Performance in Underwater Dolphin Kick of Human",
Journal of Biomechanical Science and Engineering,
Vol.4, No.1, pp.94-104
(2009)
(Download full paper at the journal's website)
-
Hirokazu Kiuchi, Motomu Nakashima, Kuangyou B. Cheng and Mont Hubbard,
"Modeling Fluid Forces in the Dive Start of Competitive Swimming",
Journal of Biomechanical Science and Engineering,
Vol.5, No.4, pp.314-328
(2010)
(Download full paper at the journal's website)
-
Motomu Nakashima, Hirokazu Kiuchi and Kenji Nakajima
"Multi Agent/Object Simulation in Human Swimming",
Journal of Biomechanical Science and Engineering,
Vol.5, No.4, pp.380-387
(2010)
(Download full paper at the journal's website)
-
Motomu Nakashima, Shingo Suzuki and Kenji Nakajima
Development of a Simulation Model for Monofin Swimming
Journal of Biomechanical Science and Engineering
Vol.5, No.4, pp.408-420
(2010)
(Download full paper at the journal's website)
-
Keiko Akiyama, Motomu Nakashima and Issei Ogasawara,
Proposal of Walking in Water for ACL Injury Rehabilitation Program by Simulation
Journal of Biomechanical Science and Engineering, Vol.5, No.4 (2010), pp.461-471
(Download full paper at the journal's website)
-
Keiko AKIYAMA, Motomu NAKASHIMA and Tasuku MIYOSHI,
"Simulation Analysis of the Mechanical Body Load during Walking in Water",
Journal of Environment and Engineering, Vol.6, No.2 (2011), pp.365-375.
(Download full paper at the journal's website)
-
Motomu Nakashima,
Modeling and Simulation of Human Swimming,
Journal of Aero Aqua Bio-mechanisms,
Vol.1, No.1,
pp.11-17
(2010)
(Download full paper at the journal's website)
-
Keiko Akiyama, Motomu Nakashima and Issei Ogasawara,
Optimal Design of Orthosis during Walking in Water for the Rehabilitation of ACL Injury,
Journal of Biomechanical Science and Engineering,
Vol.6, No.4,
pp.222-235
(2011)
(Download full paper at the journal's website)
-
Motomu Nakashima, Akemi Takahashi,
Clarification of Unsteady Fluid Forces Acting on Limbs in Swimming Using an Underwater Robot Arm
(Development of an Underwater Robot Arm and Measurement of Fluid Forces),
Journal of Fluid Science and Technology,
Vol.7, No.1,
pp.100-113
(2012)
(Download full paper at the journal's website)
-
Motomu Nakashima, Akemi Takahashi,
Clarification of Unsteady Fluid Forces Acting on Limbs in Swimming Using an Underwater Robot Arm
(2nd Report, Modeling of Fluid Force Using Experimental Results),
Journal of Fluid Science and Technology,
Vol.7, No.1,
pp.114-128
(2012)
(Download full paper at the journal's website)
-
Motomu Nakashima and Yusuke Ejiri,
Measurement and Modeling of Unsteady Fluid Force Acting on the Trunk of a Swimmer Using a Swimmer Mannequin Robot,
Journal of Fluid Science and Technology,
Vol.7, No.1,
pp.11-24
(2012)
https://www.jstage.jst.go.jp/article/jfst/7/1/7_1_11/_article
(Download full paper at the journal's website)
-
Motomu Nakashima, Shun Maeda, Takahiro Miwa and Hiroshi Ichikawa,
Optimizing Simulation of the Arm Stroke in Crawl Swimming Considering Muscle Strength Characteristics of Athlete Swimmers,
Journal of Biomechanical Science and Engineering,
Vol.7, No.2
pp.102-117
(2012)
(Download full paper at the journal's website)
-
Keiko Akiyama and Motomu Nakashima,
Simulation Analysis of Optimal Form and Orthosis during Walking in Water for Elderly People,
Journal of Biomechanical Science and Engineering,
Vol.7, No.2,
pp.211-222
(2012)
(Download full paper at the journal's website)
-
Motomu Nakashima, Go Hatakeyama, Miwako Homma and Koji Iti,
Simulation Analysis of Lift in Synchronized Swimming,
Journal of Aero Aqua Bio-mechanisms
Vol.3, No.1,
pp.51-56
(2013)
(Download full paper at the journal's website)
-
Motomu Nakashima, Shingo Suzuki, Ayako Ono, Takashi Nakamura,
Development of the Transfemoral Prosthesis for Swimming Focused on Ankle Joint Motion,
Journal of Biomechanical Science and Engineering,
Vol.8, No.1, pp.79-93 (2013)
(Download full paper at the journal's website)
-
Motomu Nakashima, Takahiro Hasegawa, Seiji Kamiya, Hideki Takagi,
Musculoskeletal Simulation of the Breaststroke,
Journal of Biomechanical Science and Engineering,
Vol.8, No. 2, pp.152-163 (2013)
(Download full paper at the journal's website)
-
Hideki Takagi, Motomu Nakashima, Takashi Ozaki, Kazuo Matsuuchi,
Unsteady hydrodynamic forces acting on a robotic hand and its flow field,
Journal of Biomechanics,
Vol.46,
pp.1825-1832
(2013)
(Journal's website)
-
Hideki Takagi, Motomu Nakashima, Takashi Ozaki, Kazuo Matsuuchi,
Unsteady hydrodynamic forces acting on a robotic arm and its flow field: Application to the crawl stroke,
Journal of Biomechanics,
Vol.47, Issue 6,
pp.1401-1408
(2014)
(Journal's website)
-
Motomu Nakashima, Yuta Nakayama, Yutaka Minami, Hideki Takagi,
Development of the simulation model for throwing motion in water polo,
Sports Engineering,
Vol.17, Issue 1, pp.45-53 (2014)
(Journal's website)
-
Motomu Nakashima and Ayako Ono,
Maximum joint torque dependency of the crawl swimming with optimized arm stroke,
Journal of Biomechanical Science and Engineering
Vol.9, No.1, pp.1-9 (2014)
(Download full paper at the journal's website)
-
Takaaki Tsunokawa, Motomu Nakashima, Hideki Takagi,
Use of pressure distribution analysis to estimate fluid forces around a foot during breaststroke kicking,
Sports Engineering,
Vol.18, No.3, pp.149-156 (2015)
(Journal's website)
-
Motomu Nakashima, Shingo Yamazaki, Janice Yue, and Kohei Nakagaki,
Simulation analysis of paddling motions in a single kayak: Development of a comprehensive dynamic model of a paddler, paddle and hull,
Proceedings of the Institution of Mechanical Engineers, Part P: Journal of Sports Engineering and Technology,
Vol.228, No.4, pp.259-269 (2014)
(Journal's website)
-
Motomu Nakashima, Yutaka Minami, Hideki Takagi,
Optimizing simulation for lower limb motion during throwing in water polo,
Mechanical Engineering Journal,
Vol.2, No.4, p.14-00472 (2015)
http://doi.org/10.1299/mej.14-00472
(Download full paper at the journal's website)
-
Motomu Nakashima and Tsutomu Nakano,
Simulation Analysis of an Octopus-Inspired Propulsion Mechanism,
Journal of Aero Aqua Bio-mechanisms,
Vol.4, No.1, p.49-55 (2015)
(Download full paper at the journal's website)
-
Motomu NAKASHIMA, Ayako ONO, Takashi NAKAMURA,
Effect of knee joint motion for the transfemoral prosthesis in swimming,
Journal of Biomechanical Science and Engineering,
Vol.10, No.3 (2015) p.15-00375
(Download full paper at the journal's website)
-
Motomu Nakashima and Kosuke Kuwahara,
Realization and swimming performance of the breaststroke by a swimming humanoid robot,
ROBOMECH Journal, Vol.3, No.1, pp.1-10 (2016)
DOI: 10.1186/s40648-016-0049-z
(Journal's website)
-
Hideki Takagi, Motomu Nakashima, Yohei Sato, Kazuo Matsuuchi, and Ross H. Sanders,
Numerical and experimental investigations of human swimming motions,
Journal of Sports Sciences, Vol.34, Issue 16, pp.1564-1580, (2016)
(Journal's website)
-
Ferryanto Ferryanto and Motomu Nakashima,
Development of a markerless optical motion capture system for daily use of training in swimming,
Sports Engineering,
Vol. 20, No. 1, pp.63-72 (2017)
(Journal's website)
-
Motomu Nakashima and Chang-Lung Tsai,
Realization and Swimming Performance of the Butterfly Stroke by a Swimming Humanoid Robot,
Journal of Aero Aqua Bio-mechanisms,
Vol.6, No.1, pp.9-15 (2017)
(Download full paper at the journal's website)
-
Motomu Nakashima, Ayako Kitazawa, Kohei Nakagaki, Naoki Onoto,
Simulation to clarify the effect of paddling motion on the hull behavior of a single kayak in a sprint race,
Sports Engineering,
Vol. 20, Issue 2, pp.133-139 (2017)
(Journal's website)
-
Motomu Nakashima, Shogo Fujita, Takahiro Miyazawa, Auke Jan Ijspeert,
CPG network to generate the swimming motion of the crawl stroke,
Mechanical Engineering Journal,
Vol.4, No.3, p.16-00279 (2017)
(Download full paper at the journal's website)
-
Takanao Fujii, Ayaka Kamada, Ryota Nakamura, Tomohisa Kato, Motomu Nakashima,
Development of an algorithm to estimate reaction forces from bathtub during soaking in the bathwater,
Mechanical Engineering Journal,
Vol.4, No. 5, p.17-00243 (2017)
(Download full paper at the journal's website)
-
Motomu Nakashima, Chie Nemoto, Taichi Kishimoto, Masahiro Terada, Yasushi Ikuta,
Optimizing simulation of arm stroke in freestyle for swimmers with hemiplegia,
Mechanical Engineering Journal,
Vol.5, Issue 1, Pages 17-00377 (2018)
(Download full paper at the journal's website)
-
Motomu Nakashima, Takahiro Miyazawa, Yuji Ohgi,
Development of a kick timing estimation algorithm in the crawl stroke for a biofeedback training system using neural oscillators,
Mechanical Engineering Journal,
Vol.5, Issue 3, Pages 17-00518 (2018)
(Download full paper at the journal's website)
-
Ryota Nakamura, Tomohisa Kato, Minoru Ssato, Takanao Fujii, Motomu Nakashima,
Evaluation of soaking postures in bathwater using a biomechanical model considering buoyancy and passive elastic joint moment,
Mechanical Engineering Journal,
Vol.5, Issue 3, Pages 18-00006 (2018)
(Download full paper at the journal's website)
-
Motomu Nakashima, Shota Ito, and Kohei Nakagaki,
Simulation of sprint canoe paddling,
Sports Engineering, Vol.22, No.1, pp.1-8 (2019)
(Journal's website)
-
Kenzo Narita, Motomu Nakashima, and Hideki Takagi,
Effect of leg kick on active drag in front-crawl swimming: comparison of whole stroke and arms-only stroke during front-crawl and the streamlined position,
Journal of Biomechanics, Vol.76 pp.197-203 (2018)
(Journal's website)
-
Ryota Nakamura, Takuro Yoneda, Tomohisa Kato, Motomu Nakashima,
Development of an algorithm to estimate soaking posture in the bathwater,
Mechanical Engineering Journal,
Vol.6, Issue 4, Pages 18-00532 (2019)
(Download full paper at the journal's website)
-
Motomu Nakashima, Takuro Yoneda, Tetsuro Tanigawa,
Simulation analysis of fin swimming with bi-fins,
Mechanical Engineering Journal,
Vol.6, Issue 4, Pages 19-00011 (2019)
(Download full paper at the journal's website)
-
Fakhrur Razi, Motomu Nakashima,
Realization and Swimming Performance of Backstroke by the Swimming Humanoid Robot,
Journal of Aero Aqua Bio-mechanisms,
Vol.8, Issue 1, Pages 75-83 (2019)
(Download full paper at the journal's website)
-
Motomu Nakashima, Ryohei Kanie, Takatsugu Shimana, Yuji Matsuda, Yasuyuki Kubo,
Development of a comprehensive method for musculoskeletal simulation in swimming using motion capture data,
Proceedings of the Institution of Mechanical Engineers, Part P: Journal of Sports Engineering and Technology, (2019)
(Journal's website)
-
Motomu Nakashima, Ryosuke Takahashi, Taichi Kishimoto,
Optimizing simulation of deficient limb’s strokes in freestyle for swimmers with unilateral transradial deficiency,
Journal of Biomechanical Science and Engineering,
Vol.15, Issue 1, Pages 19-00467 (2020)
(Download full paper at the journal's website)
-
Motomu Nakashima, Satoshi Fukuda, Takanao Fujii, Rie Ssuzuki, Mamiko Azuma, Ryota Nakamura,
Evaluation of biomechanical loads for three-dimensional soaking postures in bathwater,
Journal of Biomechanical Science and Engineering,
Vol.15, No.4 (2020), p.20-00062 (2020)
(Download full paper at the journal's website)
-
Fulgentius Ferryanto, Andi Mahyuddin, Motomu Nakashima,
Markerless Optical Motion Capture System for Asymmetrical Swimming Stroke,
Journal of Engineering and Technological Sciences,
Vol.54, No.5 P-220503 (2022)
(Journal's website)
-
Mariana Sequeira, Francisca Simoes, Carlos Quental, Jorge Ambrosio, Pedro Fonseca, Joao Paulo Vilas-Boas, Motomu Nakashima,
Biomechanical framework for the inverse dynamic analysis of swimming using hydrodynamic forces from swumsuit,
Computer Methods in Biomechanics and Biomedical Engineering (2022)
(Journal's website)
-
Carlos Quental, Francisca Simoes, Mariana Sequeira, Jorge Ambrosio, Joao Paulo Vilas-Boas, Motomu Nakashima,
A multibody methodological approach to the biomechanics of swimmers including hydrodynamic forces,
Multibody System Dynamics (2022)
(Download full paper at the journal's website)
-
Motomu Nakashima, Yohei Chida,
Effects of paddle dimensions on shoulder joint torque for a swimmer with unilateral transradial deficiency,
Sports Engineering,
Vol.26, No.1 (2023)
(Journal's website)
Contact
Please feel free to contact us about SWUM to the mail address:
swum-admin_at_swum.org
(Please change "_at_" into "@").
 hits since 2011/8/30
hits since 2011/8/30